







高光谱成像技术在病虫害精准防治中的应用
发布时间:2025-11-13
浏览次数:336
高光谱技术通过捕捉作物细微的光谱特征变化,实现病虫害的早期诊断与精准防治,为现代农业提供前所未有的监测与预警能力。
高光谱技术通过捕捉作物细微的光谱特征变化,实现病虫害的早期诊断与精准防治,为现代农业提供前所未有的监测与预警能力。

技术原理与诊断机制
病虫害的光谱响应特征
病虫害侵袭导致作物生理生化参数改变,进而引起光谱反射特征变化。叶部病害通常导致叶绿素含量下降,在550nm处反射率升高5-8%,680nm处"红谷"特征减弱,近红外平台反射率降低10-25%。虫害取食造成叶片结构破坏,在1650-1850nm短波红外区间出现特异性吸收峰。霉菌感染增加叶片水分含量,在970nm和1200nm水吸收带出现深度变化。
通过建立光谱指数可量化病虫害程度。病害严重度指数(DSI)结合680nm和800nm波段:DSI = (R800 - R680)/(R800 + R680),健康植株DSI > 0.3,病害植株DSI < 0.2。虫害压力指数(IPI)利用1650nm和1720nm波段比值,精度达90%以上。这些指数实现病虫害的定量化评估。
多维度诊断模型
高光谱技术可区分病虫害类型与严重等级。基于支持向量机(SVM)和随机森林(RF)的分类模型,对5种常见病害的识别精度达92-96%。深度学习模型通过卷积神经网络(CNN)分析光谱图像,同时定位病害区域并评估严重度,交并比(IoU)超过0.85。
时序监测揭示病虫害发展规律。通过连续7-14天每日采集,构建病虫害发展曲线,预测爆发时间点提前3-5天。多参数融合模型结合光谱特征与环境数据(温湿度、土壤条件),预测准确率提高至88%。
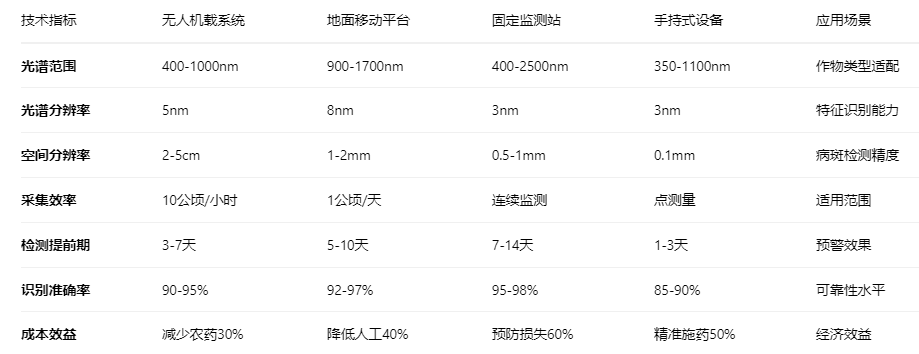
高光谱病虫害监测系统技术参数与应用效果
实际应用与集成方案
无人机遥感监测系统
大田块监测采用多旋翼无人机平台,搭载高光谱成像仪(400-1000nm),飞行高度50-100米,地面分辨率3-5厘米。系统自动生成病虫害分布热力图,标识重点防治区域。变量施药系统根据病害严重度自动调节农药浓度,减少农药使用35-50%。
无人机平台实现快速响应。紧急情况下,100公顷农场可在2小时内完成全面普查,及时发现病害中心并隔离处理。路径规划算法优化飞行路线,确保全覆盖的同时节约能源30%。
地面机器人精准作业
果园和温室使用地面机器人进行精细监测。机器人配备高光谱相机(900-1700nm)和机械臂,近距离扫描每株作物,空间分辨率达1-2毫米。发现病叶后,机械臂可立即进行精准切除或局部施药。
机器人系统集成多传感器。近红外光谱检测叶片水分胁迫,热成像识别感染部位温度异常,多源数据提高诊断可靠性。自主导航系统避让障碍物,适应复杂田间环境。
技术优势与创新突破
早期诊断能力
高光谱技术最大优势在于极早期预警。在病害潜伏期(接种后24-48小时),叶片光谱在710-720nm区间出现特征性反射率变化,较症状显现早5-7天。这种"无症状诊断"为防治赢得宝贵时间,避免病害大面积扩散。
虫害监测同样具有前瞻性。蚜虫侵袭初期,作物在1450nm和1940nm水吸收带出现微小变化,对应昆虫唾液注入引起的生理反应。早期发现可使防治效果提高3倍。
多病虫同步识别
一套系统可同时监测多种病虫害。通过不同波段组合与特征提取,区分白粉病(特征波段540nm、680nm)、锈病(特征波段620nm、710nm)和蚜虫危害(特征波段1450nm、1650nm)。多分类模型实现同步识别,效率比传统方法提高10倍。
抗药性监测成为可能。通过分析施药后作物光谱响应,评估防治效果,及时发现抗性种群。光谱特征与抗性基因表达相关性达0.85,为抗性治理提供新方法。
技术挑战与解决方案
数据处理的挑战
海量数据实时处理是主要瓶颈。每平方公里高光谱数据量达10-50GB,需要高效压缩算法。基于GPU的并行计算将处理时间从小时级缩短至分钟级,满足实时决策需求。
模型适应性影响推广效果。不同品种、生育期的光谱特征存在差异,需要建立自适应模型。迁移学习技术利用已有模型进行微调,减少标注样本需求80%。
环境干扰补偿
环境因素显著影响测量结果。太阳高度角变化导致光谱差异,通过大气校正模型消除。叶片角度影响反射特性,多角度观测系统采集完整二向反射分布函数(BRDF)。
天气条件限制监测频率。阴雨天气无法获取有效数据,多源数据融合填补监测空白。雷达数据穿透云层监测作物结构,与光学数据互补。
上一页 : 高光谱技术在湿地中的应用
下一页 : 高光谱成像仪光谱数据预处理方法之平滑法的类型


相关产品
-

元旦快乐 | 新岁启幕,智测未来——三恩时与您共赴2026
钟声回荡,既是告别,亦是邀请。我们深深感恩过去一年每一份相遇、每一次托付与每一段同行。过往的成绩,已由时光精准记录;未来的华章,正待我们合力书写。 ..
-

高光谱成像系统的成像原理及光谱图像信息组成
高光谱成像系统因其获取的样本信息具有图谱合一的特定,因而在不同的行业有着广泛的应用,可以对样本进行定性与定量的分析。本文对高光谱成像系统的成像原理及光谱图像的做..
-

高光谱成像仪怎么用于草莓硬度的无损检测?
硬度是评价草莓品质的重要指标之一,对草莓的硬度进行检测,不仅可以指导消费者,而且对于草莓的采后贮藏和加工具有很重要的意义。那么,高光谱成像仪怎么用于草莓硬度的无..
-

高光谱图像数据基于纯像元的分析方法
高光谱成像仪获取的高光谱数据具有波段数多、光谱分辨率高、数据量大、数据率高等特点,巨大的数据量为应用和分析带来不便,因此就需要对高光谱数据进行处理。本文对高光谱..










